用户命令接口
本文档用于给用户介绍如何使用用户命令接口,分为以下两部分:
使用用户命令的蓝牙 LE 示例工程可参考:
用户需要通过电脑的 Data UART 输入命令来执行交互(电脑的 USB 口通过 USB 转串口模块连接到 EVB)。
用户命令的实现
相关文件
每个文件的描述如下:
文件名 |
描述 |
|---|---|
|
初始化 Data UART,通过 Data UART 打印数据 |
|
Data UART DLPS 初始化,相关的 callback,及事件的处理 |
|
用于处理来自底层的 Data UART 数据,执行相应命令 |
|
定义用户命令 |
备注
data_uart.c,data_uart_dlps.c,user_cmd_parse.c及它们的头文件位于路径src\mcu\module\data_uart_cmd下。user_cmd.c文件需要用户自己定义和添加。
配置选项
开发者可以在 user_cmd_parse.h 中配置以下数值:
/*============================================================================*
* Macros
*============================================================================*/
/** @defgroup USER_CMD_PARSE_Exported_Micros User Command Parse Module Exported Micros
@brief command parse related macros.
* @{
*/
#define USER_CMD_MAX_COMMAND_LINE 80 /**< max. length of command line in bytes */
#define USER_CMD_MAX_HISTORY_LINE 3 /**< max. num of history command line */
#define USER_CMD_MAX_PARAMETERS 20 /**< max. number of parameters that the parser will scan */
/** End of USER_CMD_PARSE_Exported_Micros
* @}
*/
初始化
void app_main_task(void *p_param)
{
uint8_t event;
......
data_uart_init(evt_queue_handle, io_queue_handle);
user_cmd_init(&user_cmd_if, "central");
......
}
data_uart_init()用于初始化 Data UART。user_cmd_init()用于初始化用户命令模块。
Data UART RX 处理
void app_handle_io_msg(T_IO_MSG io_msg)
{
uint16_t msg_type = io_msg.type;
uint8_t rx_char;
switch (msg_type)
{
......
case IO_MSG_TYPE_UART:
/* We handle user command information from Data UART in this branch. */
rx_char = (uint8_t)io_msg.subtype;
user_cmd_collect(&user_cmd_if, &rx_char, sizeof(rx_char), user_cmd_table);
break;
default:
break;
}
}
user_cmd_collect() 用于收集命令字符并执行命令。
用户可以在串口助手中输入命令,命令使用 ENTER 作为结束。
Data UART TX 处理
Data UART TX 用于输出信息。
void app_handle_conn_state_evt(uint8_t conn_id, T_GAP_CONN_STATE new_state, uint16_t disc_cause)
{
......
case GAP_CONN_STATE_CONNECTED:
{
le_get_conn_addr(conn_id, app_link_table[conn_id].bd_addr,
&app_link_table[conn_id].bd_type);
data_uart_print("Connected success conn_id %d\r\n", conn_id);
}
break;
......
}
data_uart_print() 用于通过 Data UART 打印数据。
用户可以在串口助手端看到打印的信息。
如何添加命令
应用端需定义用户命令表。
命令格式如下:
/** @brief Prototype of functions that can be called from command table. */
typedef T_USER_CMD_PARSE_RESULT(*T_USER_CMD_FUNC)(T_USER_CMD_PARSED_VALUE *p_parse_value);
/**
* @brief Command table entry.
*
*/
typedef struct
{
char *p_cmd;
char *p_option;
char *p_help;
T_USER_CMD_FUNC func;
} T_USER_CMD_TABLE_ENTRY;
参数说明:
- p_cmd:
包含可在串口通信软件中使用的命令。
- p_option:
描述用户命令的格式。
- p_help:
提供关于命令的功能描述。
- func:
指向当命令被调用时,会执行的函数。
示例如下:
static T_USER_CMD_PARSE_RESULT cmd_conupdreq(T_USER_CMD_PARSED_VALUE *p_parse_value)
{
T_GAP_CAUSE cause;
uint8_t conn_id = p_parse_value->dw_param[0];
uint16_t conn_interval_min = p_parse_value->dw_param[1];
uint16_t conn_interval_max = p_parse_value->dw_param[2];
uint16_t conn_latency = p_parse_value->dw_param[3];
uint16_t supervision_timeout = p_parse_value->dw_param[4];
cause = le_update_conn_param(conn_id,
conn_interval_min,
conn_interval_max,
conn_latency,
supervision_timeout,
2 * (conn_interval_min - 1),
2 * (conn_interval_max - 1)
);
return (T_USER_CMD_PARSE_RESULT)cause;
}
const T_USER_CMD_TABLE_ENTRY user_cmd_table[] =
{
/************************** Common cmd *************************************/
{
"conupdreq",
"conupdreq [conn_id] [interval_min] [interval_max] [latency] [supervision_timeout]\n\r",
"LE connection param update request\r\n\
sample: conupdreq 0 0x30 0x40 0 500\n\r",
cmd_conupdreq
},
......
};
如何使用命令
以 conupdreq [conn_id] [interval_min] [interval_max] [latency] [supervision_timeout] 为例, conupdreq 即为 command 名,conupdreq 之后跟着的是该 command 的参数,多个参数以空格隔开。
用户可以在电脑的串口助手端输入命令,然后按 ENTER 或点击 Send 发送命令。 推荐的串口助手是 Tera Term。
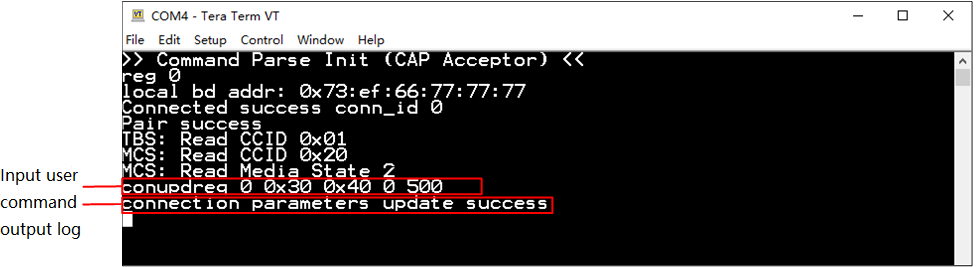
用户命令使用示例
如何显示命令
输入 ? 显示所有支持的 commands。
输入 xxx ? 显示 command 格式 ,例如 conupdreq ?。
Data UART 连接
蓝牙 LE 示例工程均默认使用 P3_0 作为 Data UART 的 TX 引脚,使用 P3_1 作为 Data UART 的 RX 引脚。
每个工程都有一份 board.h 文件,该文件定义了 Data UART 的引脚设置。
#define DATA_UART_TX_PIN P3_0
#define DATA_UART_RX_PIN P3_1
Data UART 引脚可以根据实际硬件环境自行配置。
PC 通过 USB 转串口模块连接到运行有蓝牙 LE 示例工程的 EVB 的 Data UART,如图所示:

PC 和 EVB 之间的 Data UART 连接
Data UART 的波特率设为 115200, 电脑串口助手工具的参数设置如图所示:
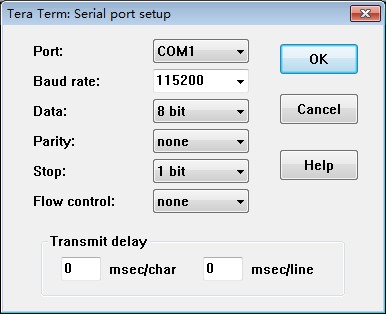
串口设置