Polling
该示例通过使用 SPI3W 的轮询方式读取鼠标传感器 ID 信息。
通过 SPI3W 与鼠标传感器进行通信,通过读取指定地址下的数据来读取指定信息。
用户可以通过不同的宏配置改变示例中 SPI3W 的引脚配置信息等,具体宏配置详见 配置选项。
环境需求
该示例的环境需求,可参考 环境需求。
硬件连线
EVB 外接 PWM3610DM-SUDU 鼠标,连接 P2_2 和 CLK,P2_3 和 SDIO,P2_4 和 CS#,同时连接 GND 和 VDD。
硬件介绍
PWM3610DM-SUDU 为激光鼠标传感器模块。PMW3610DM-SUDU 寄存器可通过串行端口访问。寄存器用于读取运动数据和状态,以及设备配置等信息。 在此示例中,使用该模块用于演示与 SPI3W 的通信,用来读取该模块的 ID 信息。
配置选项
-
可配置如下宏修改引脚定义。
#define SPI_3WIRE_CLK_PIN P2_2 #define SPI_3WIRE_DATA_PIN P2_3 #define SPI_3WIRE_CS_PIN P2_4
编译和下载
该示例的编译和下载流程,可参考 编译和下载。
测试验证
-
EVB 启动后,SPI3W 开始与鼠标传感器进行通信。通信结束后,打印获取到的 ID 信息。若 ID 为 0x3e 和 0x01(仅代表 PWM3610DM-SUDU 鼠标),代表测试成功。
id[0] = 0x3e, id[1] = 0x01 SPI3W test pass!
代码介绍
该章节主要介绍示例中的初始化和相应功能实现的代码和流程说明。
源码路径
工程文件和源码路径如下:
工程路径:
sdk\samples\peripheral\spi3wire\polling\proj源码路径:
sdk\samples\peripheral\spi3wire\polling\src
初始化
外设的初始化流程可参考 General Introduction 中的 初始化流程 部分。
-
调用
Pad_Config()与Pinmux_Config(),配置对应引脚的 PAD 和 PINMUX。void board_spi3wire_init(void) { Pad_Config(SPI_3WIRE_CLK_PIN, PAD_PINMUX_MODE, PAD_IS_PWRON, PAD_PULL_NONE, PAD_OUT_ENABLE, PAD_OUT_HIGH); Pad_Config(SPI_3WIRE_DATA_PIN, PAD_PINMUX_MODE, PAD_IS_PWRON, PAD_PULL_NONE, PAD_OUT_ENABLE, PAD_OUT_HIGH); Pad_Config(SPI_3WIRE_CS_PIN, PAD_PINMUX_MODE, PAD_IS_PWRON, PAD_PULL_NONE, PAD_OUT_ENABLE, PAD_OUT_HIGH); Pinmux_Config(SPI_3WIRE_CLK_PIN, SPI2W_CLK); Pinmux_Config(SPI_3WIRE_DATA_PIN, SPI2W_DATA); Pinmux_Config(SPI_3WIRE_CS_PIN, SPI2W_CS); }
调用
RCC_PeriphClockCmd(),开启 SPI3W 时钟。-
对 SPI3W 外设进行初始化:
定义
SPI3W_InitTypeDef类型SPI3W_InitStruct,调用SPI3W_StructInit()将SPI3W_InitStruct预填默认值。根据需求修改
SPI3W_InitStruct参数,SPI3W 的初始化参数配置如下表。调用
SPI3W_Init(),初始化 SPI3W 外设。
SPI3W Hardware Parameters |
Setting in the |
SPI3W |
|---|---|---|
SPI3W Source Clock |
20000000 |
|
SPI3W Clock |
800000 |
|
SPI3W Mode (3-Wire or 2-Wire) |
||
Read Delay Cycle |
0x3 |
功能实现
SPI3W 以轮询模式读取数据的流程如图所示:
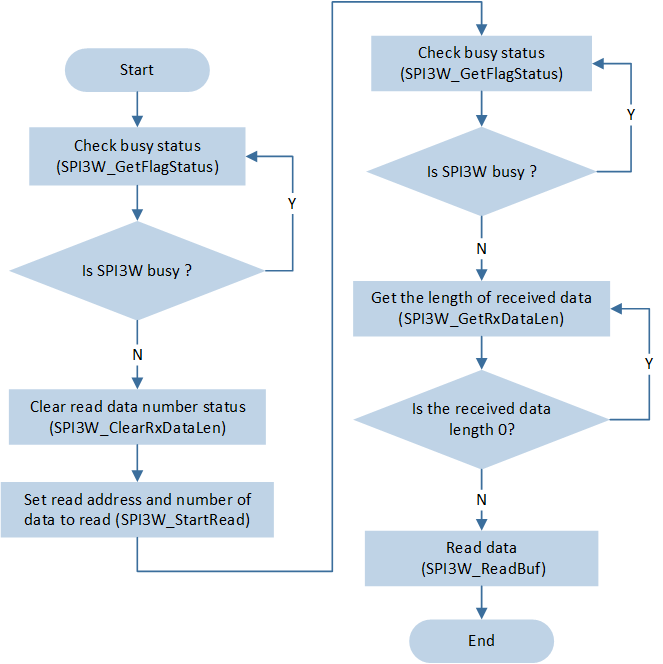
SPI3W 轮询模式读取数据流程图
-
在读取数据之前执行信号同步的流程。设置 resync 时间,发送 resync 信号,等待 resync 信号输出完毕后失能 resync 信号。随后调用
SPI3W_Cmd()函数,使能三线 SPI 功能。SPI3W_SetResyncTime(2); SPI3W_ResyncSignalCmd(ENABLE); while (SPI3W_GetFlagStatus(SPI3W_FLAG_RESYNC_BUSY) == SET); SPI3W_ResyncSignalCmd(DISABLE); SPI3W_Cmd(ENABLE);
-
调用
spi3wire_readbyte函数,传入地址参数,读取鼠标 ID 信息。等待 busy 状态标志位消除。
调用
SPI3W_ClearRxDataLen(),清除 SPI3W 的接收的数据长度。调用
SPI3W_StartRead(),传入地址信息和需要读取的数据长度,开始读取该地址下的数据。等待 busy 状态标志位消除。循环判断是否接收到数据。如果接收到数据,调用
SPI3W_ReadBuf()读取 SPI3W 接收 FIFO 中数据。返回读取的数据并打印。
uint8_t spi3wire_readbyte(uint8_t address) { uint8_t reg_value = 0; uint32_t timeout = 0; /* Check spi busy or not */ while (SPI3W_GetFlagStatus(SPI3W_FLAG_BUSY) == SET) { timeout++; if (timeout > 0x1ffff) { break; } } /* Clear Receive data length */ SPI3W_ClearRxDataLen(); SPI3W_StartRead(address, 1); timeout = 0; while (SPI3W_GetFlagStatus(SPI3W_FLAG_BUSY) == SET) { timeout++; if (timeout > 0x1ffff) { break; } } /* Get the length of received data */ while (SPI3W_GetRxDataLen() == 0); /* Read data */ SPI3W_ReadBuf(®_value, 1); return reg_value; }
See Also
相关 API Reference 请查看: