Task Management
- group OS_87x3e_Task
-
Define, create, and control task functions.
The Task Management function group allows to create, delete, and control tasks in the system.
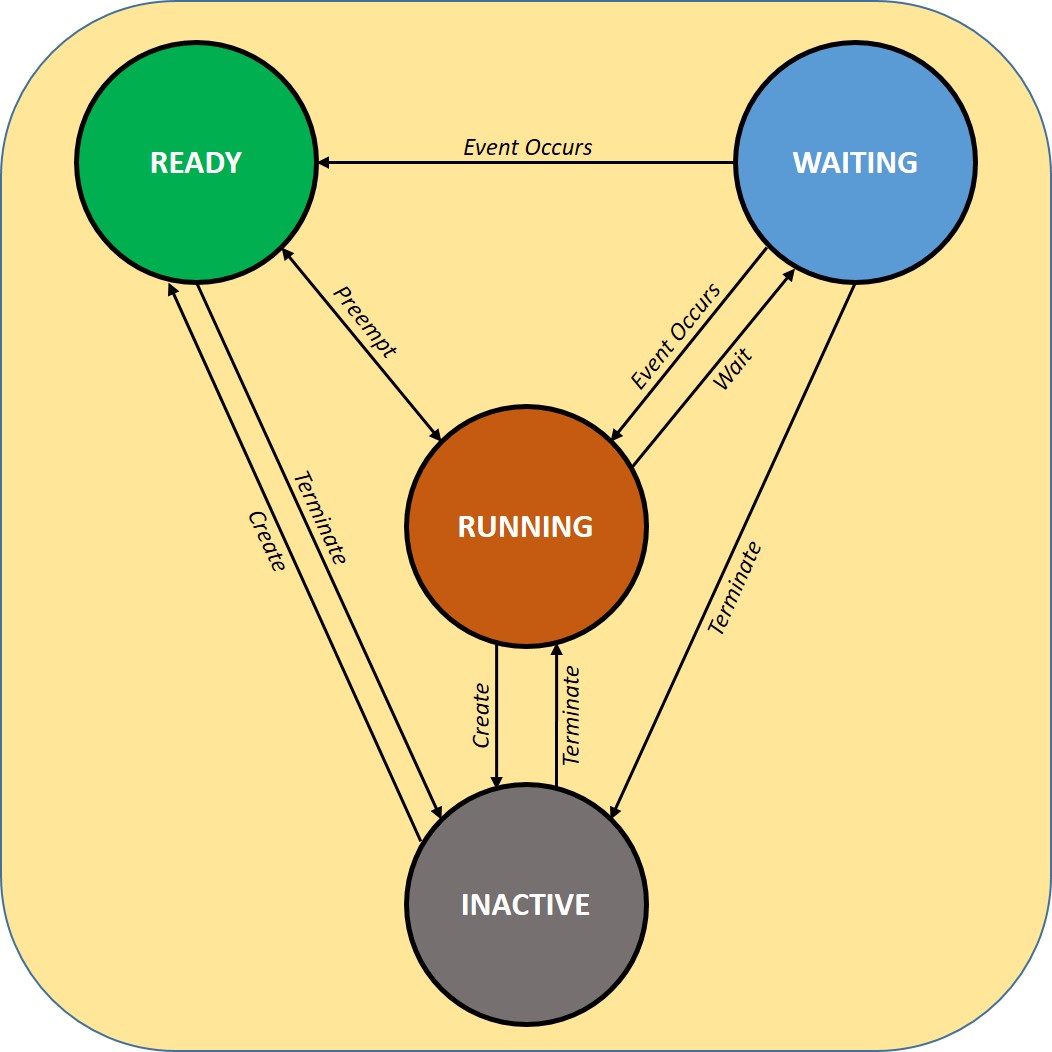
Tasks can be in the following states:
RUNNING: The task that is currently running is in the RUNNING state. Only one task at a time can be in this state.
READY: Tasks which are ready to run are in the READY state. Once the RUNNING task has terminated or is WAITING, the next READY task with the highest priority becomes the RUNNING task.
WAITING: Tasks that are waiting for an event to occur are in the WAITING state.
INACTIVE: Tasks that are not created or terminated are in the INACTIVE state. These Tasks typically consume no system resources.